microSERF Zero Field Vector Magnetometer
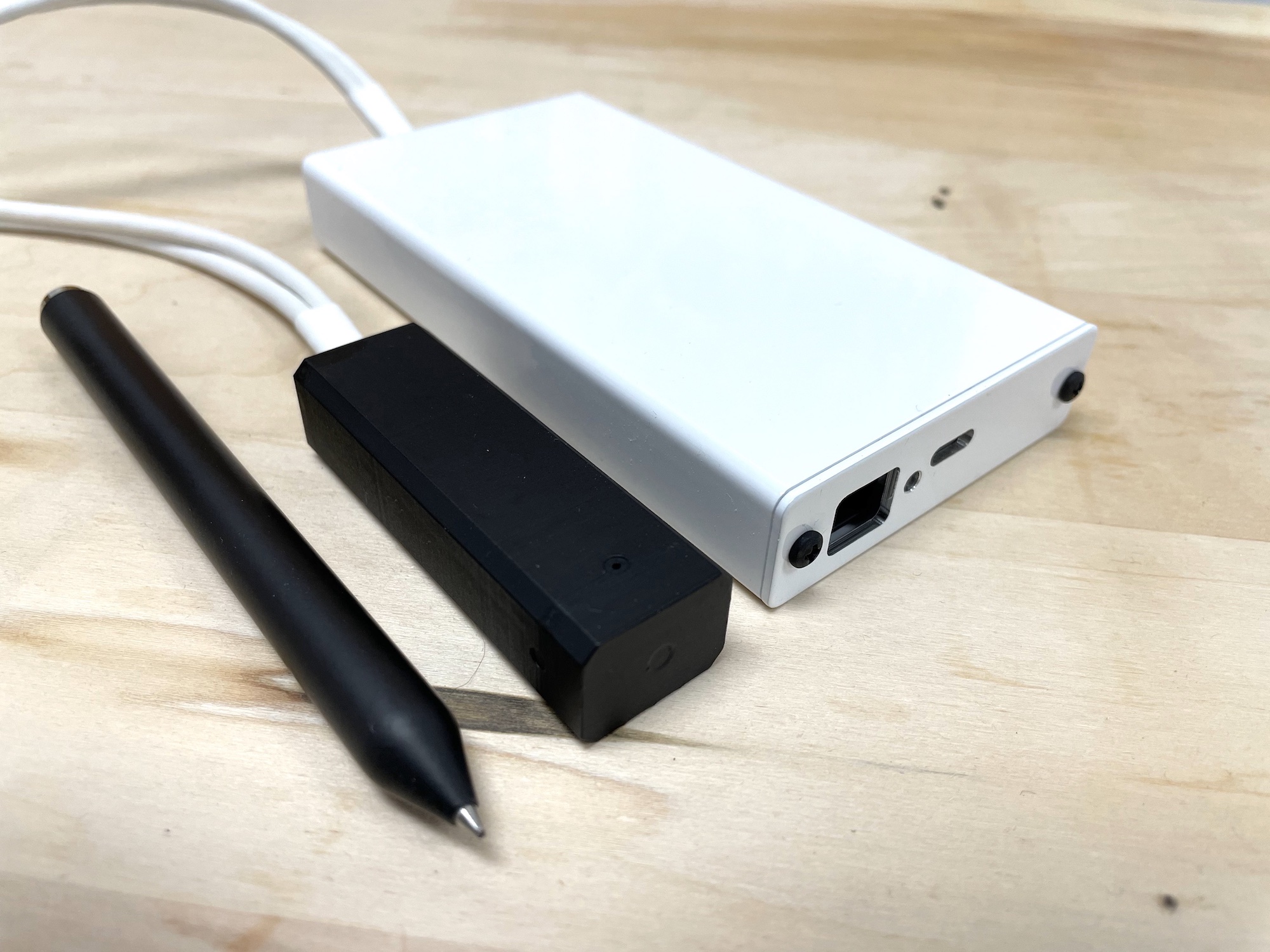
The SERF regime exploits the fundamental zero field resonance of alkali metal atoms to make sensitive magnetic field measurements near zero field. microSERF uses a small microfabricated cell that is positioned close to the end of the sensor. Using this sensor it is possible to obtain very high sensitivity to small signals close to the tip of the sensor.
Features
- Vector magnetic field sensor
- 2 axis sensitivity
- Optically pumped alkali metal
- Sensitivity: < 30 fT/Hz1/2
- Bandwidth: 150 Hz
- Power: 5 W (5V, USB-compatible)
- Dynamic range: ±10 nT
- Compensation range: ±200 nT
- Surface temperature: < 40 C
Interface
- Serial data output
- USB-C serial (driverless on modern operating systems)
- RJ-45 8p8c connector: Power, LVDS Serial, LVDS Sync Clock
- microSERF command reference
- Software support
Operation
Place the sensor in a near-zero-field environment. Plug it in, and wait for the sensor to warm up. The status light blinks according to the sensor status:
| Code | Color | Status |
|---|---|---|
| -2 | Red/Black | Low Voltage |
| -1 | Red/Black | Error |
| 0 | White/Black | Idle/off |
| 1 | Red/White | Cell heating |
| 2 | Yellow/Red | Laser locking |
| 3 | Red/Black | Field zeroing failed |
| 4 | Blue/Yellow | Field zeroing active |
| 5 | Blue/Yellow | Field zeroing complete |
| 6 | Blue/Yellow | Calibrating |
| 7 | Green/White | Calibrated / Operational |
On startup, the sensor automatically tries to zero the field and calibrate. On success, you will find a green light indicating the sensor is acquiring valid, calibrated data.
If the sensor is repositioned or the field environment changes, it is necessary to re-zero and re-calibrate. The labview program has an "Auto Zero" button that issues the auto.zero command to start the zeroing and calibration process.
Firmware
Firmware update: SERF-R8-firmware-2022-02-22-db3b93
Ordering
microSERF, inquire for price. .